
Abstract
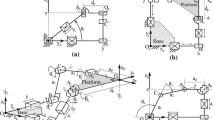
The aim of this paper is to propose a geometric based approach for workspace analysis of Translational Parallel Manipulators (TPMs), which will be useful for the dimensional synthesis problem. For this purpose, a non-exhaustive list of TPMs in the bibliography is presented and grouped according to the structure of their legs as well as the shape of their workspaces. The approach is easy to implement and it is illustrated through three TMPs examples, having each a different workspace shape.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Similar content being viewed by others


References
Gough, V.E., Whitehall, S.G.: Universal tyre test machine. FISITA Proc. 117, 117–137 (1962)
Stewart, D.: A platform with six degrees of freedom. Proc. Inst. Mech. Eng. 180(428), 371–386 (1965)
Vischer, P., Clavel, R.: Delta_kinematic calibration.pdf. Robotica 16, 207–218 (1997)
Kim, D., Chung, W.K.: Kinematic condition analysis of three-DOF pure translational parallel manipulators. J. Mech. Des. Trans. ASME 125(2), 323–331 (2003)
Romdhane, L., Affi, Z., Fayet, M.: Design and singularity analysis of a 3-translational-DOF in-parallel manipulator. J. Mech. Des. 124(3), 419–426 (2002)
Callegari, M., Palpacelli, M.C.: Prototype design of a translating parallel robot. Meccanica 43(2), 133–151 (2008)
Essomba, T., Laribi, M.A., Zeghloul, S., Poisson, G.: Optimal synthesis of a spherical parallel mechanism for medical application. Robotica 34(3), 671–686 (2016)
Pierrot, F., Reynaud, C., Fournier, A.: DELTA: a simple and efficient parallel robot. Robotica 8(pt 2), 105–109 (1990)
Laribi, M.A., Romdhane, L., Zeghloul, S.: Analysis and dimensional synthesis of the DELTA robot for a prescribed workspace. Mech. Mach. Theory 42(7), 859–870 (2007)
Stan, S., Manic, M., Maties, V., Vistrian, M., Radu, B.: Evolutionary approach to optimal design of 3 DOF translation exoskeleton and medical parallel robots (good literature on workspace analysis). In: Conference on Human System Interactions, pp. 720–725 (2008)
Tsai, L., Walsh, G.C., Stamper, R.E.: Kinematics of a novel three DOF translational platform. In: Proceedings of the 1996 IEEE International Conference on Robotics and Automation, Minneapolis, Minnesota, pp. 3446–3451 (1996)
Chebbi, A.H., Parenti-Castelli, V.: Geometric and manufacturing issues of the 3-UPU pure translational manipulator. In: Pisla, D., Ceccarelli, M., Husty, M., Corves, B. (eds.) New Trends in Mechanism Science. Mechanisms and Machine Science, vol. 5, pp. 595–596 (2010)
Chebbi, A.H.: The potential of the 3-UPU translational parallel manipulator and a procedure to select the best architecture. Università di Bologna (2011)
Walter, D.R.: Analysis of Planar and Spatial Mechanisms Using Algebraic Methods. Innsbruck University (2011)
Walter, M.L.H.D.R.: Kinematic analysis of the TSAI 3-UPU parallel manipulator using algebraic methods. In: 13th IFToMM World Congress (2007)
Tsai, L.-W., Joshi, S.: Kinematic analysis of 3-DOF position mechanisms for use in hybrid kinematic machines. J. Mech. Des. 124(2), 245 (2002)
Siciliano, B.: The tricept robot: inverse kinematics, manipulability analysis and closed-loop direct kinematics algorithm. Robotica 17(4), 437–445 (1999)
Ruggiu, M.: Kinematics analysis of the CUR translational manipulator. Mech. Mach. Theory 43(9), 1087–1098 (2008)
Gosselin, I.A., Kong, C.M., Foucault, X., Bonev, S.: A fully-decoupled 3-DOF translational parallel mechanism. In: Proceedings of the Fourth Chemnitz Parallel Kinematics Seminar, Parallel Kinematic Machines International Conference, pp. 595–610 (2004)
Hervé, J.M.: Design of parallel manipulators via the displacement group. In: Proceedings of Ninth World Congress on the Theory of Machines and Mechanisms, vol. 3, pp. 2079–2082, April 1995
Kong, X., Gosselin, C.M.: Generation of parallel manipulators with three translational degrees of freedom based on screw theory. In: Symposium on sur les mécanismes, les machines et la mécatronique de CCToMM, pp. 3–5, September 2001
Carricato, M., Parenti-Castelli, V.: Singularity-free fully-isotropic translational parallel mechanisms. Int. J. Rob. Res. 21(2), 161–174 (2002)
Zeng, Q., Ehmann, K.F., Cao, J.: Tri-pyramid robot: design and kinematic analysis of a 3-DOF translational parallel manipulator. Robot. Comput. Integr. Manuf. 30(6), 648–657 (2014)
Acknowledgements
This research is supported by ROBOTEX, the French national network of robotics platforms (N° ANR-10-EQPX-44-01) and by the French National Research Agency (ANR-14-CE27-0016).
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2019 CISM International Centre for Mechanical Sciences
About this paper

Cite this paper
Ben Hamida, I., Laribi, M.A., Mlika, A., Romdhane, L., Zeghloul, S. (2019). Geometric Based Approach for Workspace Analysis of Translational Parallel Robots. In: Arakelian, V., Wenger, P. (eds) ROMANSY 22 – Robot Design, Dynamics and Control. CISM International Centre for Mechanical Sciences, vol 584. Springer, Cham. https://doi.org/10.1007/978-3-319-78963-7_24
Download citation
DOI: https://doi.org/10.1007/978-3-319-78963-7_24
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-78962-0
Online ISBN: 978-3-319-78963-7
eBook Packages: Intelligent Technologies and RoboticsIntelligent Technologies and Robotics (R0)