
Abstract
Auxetic materials are materials with a peculiar mechanical behavior compared to other regular materials. Its main difference exists in its reaction to tension. Most materials exhibit a positive Poisson’s ratio [1], that is, they laterally shrink when stretched or expand when compressed. On the contrary, auxetic materials exhibit a negative Poisson’s ratio (NPR), that is, they laterally expand when stretched or laterally shrink when compressed [2]. In this paper, the significance and role of geometry in auxetic materials’ behavior will be investigated. For this purpose, we will be using shape grammar rules with a strong generative tool called Shape Machine [3] to create auxetic geometries with their complex behavior out of simple rules. These geometries’ applications can be fabricating sustainable kinetic panels for buildings to interact with and adapt to the environment.
You have full access to this open access chapter, Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
In the world of materials, the Poisson’s ratio is a dimensionless constant that depends on the direction of an applied load and describes the ratio of negative transverse strain to the longitudinal strain of a body submitted to a tensile load [4]. This name, derived from the Greek word auxetikos, means “that which tends to increase”. In theory, for isotropic 3D materials the Poisson’s ratio is between −1 and 0.5 While for isotropic 2D materials, it can assume values from −1 to 1 [5] (Fig. 1).

Positive and negative Poisson’s ratio and its effect on the shape of material [2]
Compared to conventional materials, auxetic materials possess some enhanced properties, such as shear resistance, indentation resistance, synclastic curvature, crash worthiness, and sound absorption [2]. These properties are the reasons behind auxetic material's strange and useful behaviors. For instance:
Shear resistance: when the Poisson’s ratio decreases, the value of the shear modulus and consequently the shear resistance of the material increases.
Fracture resistance: Materials that possess a negative Poisson’s ratio to have better resistance to fracture than “regular” materials. They also have low crack propagation, and more energy is necessary to expand them than in the case of “regular” materials.
Acoustic absorption: Auxetic foams due to their texture and geometries have a superior capacity for acoustic absorption than conventional foams.
Synclastic behavior: Synclastic behavior is a body’s ability to deform in a shape of a dome when it is bent.
Shape memory auxetics: Shape memory is the ability of a material subjected to a plastic or semi-plastic deformation to remember and return to its initial shape, size, and form when submitted to a specific thermal stimulation [2].
Energy absorption properties: Auxetic materials have better energy absorption properties, too. The cyclic compression tests on auxetic foams showed the damping capacity of auxetic foams was 10 times higher than that of the original foams that were used for making the auxetic foams [6]. Sound absorption and crash worthiness of auxetic materials were also found to be enhanced and improved compared to conventional materials.
Permeability: The auxetic materials have superior permeability compared with conventional materials, due to their pore-opening properties [2].
These enhanced properties make the auxetic materials very attractive for many potential applications, such as personnel protection, military use, biomedicine, aerospace, and textiles [7]. This property makes the auxetic materials more sensitive and useful for sensor applications. Protective clothing and equipment are indispensable for some dangerous sports, such as riding, racing, and skating, to protect wearers from injuries by impact forces [8]. In particular, the parts of the body, such as elbows and knees, which are easily injured, need to be protected, so protective pads are usually used in these areas [2].
Another very important application of these materials can be in building systems as a more sustainable material [9]. Similar to the natural systems that adapt to external conditions, kinetic facades can help internal and external environments adapt and therefore improvement of the building’s performance by their dynamic adjustments [10] These kinetic systems typically rely on complex expensive mechanisms, like motors and gears. Compliant, kinetic materially flexible, and adjustable, structures present a more sustainable alternative to such systems. Bistable laminates [9] are one instance of these compliant structures which need a little energy for activation and transition between their two phases. Auxetic meta-materials do behave in a manner that can not only suit bistable material, but also kinetic facades in general. Being able to transform between shapes with a negative Poisson ratio and flexible geometry, they can gradually change shape with adjustable and flexible materials that interact with environmental activators like light and temperature. In this paper, we aim to find a way to recognize and generate these geometries for potential applications in material and building sciences (Fig. 2).

Auxetic materials’ flexible behavior [1]
2 Methodology
This research aims to find a generative method for auxetic geometries and patterns to create more variations of them in a shorter amount of time and use simple rules rather than complex mathematical algorithms. This means that using shape grammar over other parametric and algorithmic methods has the advantage of first talking with the language of real shapes [11] (visionary) and not programming symbols for those who don’t have coding and programming skills and are interested in geometry and its applications. This will make understanding the geometries generation and their patterns much easier and therefore understandable and creative. And second, using the powerful shape grammar tool, Shape Machine enables us for faster generation of hundreds and thousands of variations of each geometrical combination. In the Shape Machine tool, the very core values underlying are the calculations with shapes, the visual treatment of emergence and ambiguity, and the seamless interface in design workflows [3]. Moreover, the conventions of matching under which a shape can be a part of a design is another main feature of shape machine [3]. Its foregrounding of visual rules over symbolic rules (instructions defined in some programming language) provides a robust and disruptive technology which is differentiating this method and makes it a strong generative tool. Having the history of variation also helps us track the auxetic behavior in each stage of the pattern generation. This will have three benefits: 1 and 2 are that each series of tessellation can give us more than one effective auxetic pattern, as it might have auxetic behavior in more than one stage of the generation. For example, it might have auxetic behavior with or without the fourth layer or stage of the geometry, which can be used in different ways. Other than that, one stage of the tessellation might behave as auxetic but not the next, and it will help us to track the geometry and not lose the pattern in its last format. And 3. We can extract the pattern of auxetic behavior in different variations, combine them, and generate new patterns. This tool is a powerful generative tool to not only create new tessellations and patterns but also apply minor and major changes to them and have infinite variations of each with very simple rules that will be explained following.
In this paper, we started with tessellation and Gereh geometries [12] that were comprised of two shapes and already existed in the literature of auxetic behavior.
These geometries simply can provide the quality needed for an auxetic material, which is the negative Poisson ratio. Two shapes are the simplest geometries [13] that are being studied in this research, but there is a wide range of variety in shapes. They can even go beyond the repetitive and periodic patterns up to the aperiodic quasicrystals [14]. But this paper starts with the very basic shapes to establish the study of the mechanisms and then with an extensive analogy applies the type of mechanism to other more complex geometries.
Shape machine works with identity rules, rules that pick up parts without necessarily doing anything to them. The identity rules have identical left-hand sides (LHS) and right-hand sides (RHS) and apply under any given transformation grammar to pick up parts in a shape seamlessly reorganizing the underlying structure of the shape [15] “Technically, for shapes A and B, the shape rule A → A can apply to a shape B whenever there is a transformation T that makes the shape T(A) part of the shape B. If the shape T(A) is part of the shape B, the rule subtracts the shape T(A) from the shape B and replaces it with the very same shape T(A). The resulting shape B_ and the corresponding computation are given below” [3]:
Three conditions have structured the outline of the visual queries respectively [3]:
-
(a)
The types of lines that make up a shape, limited here to straight lines, arcs, and their combinations;
-
(b)
the types of transformations T under which a rule applies, namely isometries and similarities; and
-
(c)
the determinacy or indeterminacy of a rule application.
The shape machine in simple words is a machine with a left-hand side and a right-hand side. This is basically what is called a shape rule. On the left-hand side, there is the initial existing shape which will be transformed into the one on the right-hand side. There are three main conditions under which the rules will be applied: Isometry, Similarity, and Affinity [16].
-
1.
Isometry finds the exact shape as well as its rotated and reflected versions.
-
2.
Similarity finds the shape, rotated, reflected, AND scaled versions of it.
-
3.
Affinity finds all the above-mentioned versions of the initial left-hand side shape as well as its deformed distorted angels.
As you will see, they become more inclusive in the order of first to last one, and each of them has its own application accordingly.
Isometry transformations keep the shape and size of a shape but alter its position and/or handedness. In this kind of transformation, the LHS shape is detected in the same size, scale, and shape but its Euclidean position can be differentiated, like its direction, rotation, and position (Fig. 3).

Isometry shape detection in Shape Machine [3]
Visual queries always need not be confined to identical copies. Often designers want to search for similar copies of a shape in smaller or larger versions and in any location and/or possible enantiomorphic or handed versions in a model or series of models. The new unique transformation introduced in the visual query is the scale transformation that changes the size of the shape. Scale transformations combine with Isometric transformations to produce Similarity transformations that keep the shape of a shape but alter its size, position, and/or handedness. The next series of visual queries in Shape Machine are constructed around shapes that consist of straight lines and are searched under Similarity transformations (Fig. 4) in a determinate way. In this kind of transformation, the defined shape in the LHS of the rule can be detected not only in the same size and form but also in different scales as well as different positions and locations.

Similarity shape detection in Shape Machine [3]

Affinity shape detection in Shape Machine [3]

Drawscript+ environment—generating the basic tessellation
The next step will be to change them to the RHS shape. The third level of transformation is the Affinity transformation (Fig. 5) in which not only the similar to LHS shapes in the design can be detected, but also the shapes that are skewed in scale and even angle also considered. Under this transformation, it is enough to have the same number of shape edges and vertices regardless of their connection angle or size. This tool is a very strong tool for many purposes.
The process of generating auxetic geometries using Shape Machine started with forming a basic tessellation context. Following the tessellation grammar will be demonstrated. Then for each pattern, the specific rules which result in that pattern will be shown as the Shape Machine program charts. These charts are called Drawscript+. Including the above-mentioned LHS and RHS shapes, the transformation rule, and options to choose the setting of Isometry, Similarity, and Affinity. The machine also enables loops of repetitive rules. For example, Fig. 6 script creates the basic tessellation context for us to facilitate generating some of the desired Islamic patterns. There are three charts starting from 0 and ending to chart number 2. As it is mentioned in the charts the very first rules are JUMP Fig. 3. It creates the loop of start here at chart 0 with no shape, go to the chart number 1, if there is no shape jump to the chart number 2. This is where the first shape is being created as the context tessellation. Mirroring the tessellation and continuing them in rows happens in these loop jumps. After the jumps are finished it will process the rest of the first chart to unify the layers as well as apply the specifying geometry rules (Fig. 7).

Tessellation generatin history step by step
In Fig. 8, you can see the initial shape by which we started the shape generation process after having our context tessellation. The next rules will be customized for each pattern.

Shape rules for customized pattern—simple cut auxetic
The first and most simple flexible stretchable pattern for an auxetic material comprised of straight cuts [17] (Fig. 9).

Rotating square auxetic pattern bottom-up formation
The next pattern does emerge from the rotation of a square unit [18]. Knowing the top-down overlook in Islamic tiling, here a bottom-up approach is taken starting from the basic square in the same tessellation context. Rotating squares create a space in between which provides the space for the geometry and material to expand and stretch. Using the rule under different conditions of Isometry, Similarity, and Affinity generated different patterns which are not mentioned here due to the complexity of the geometries. The simplest and most well-known geometry is the simple rotating square [19] which will be investigated in this research.
Lim [6] worked on an analytical approach in auxetic geometry. Doing an analogy between the rotating units and other more complex shapes, we can define some rules to predict whether a geometry can act auxetic or not. In this analogy, the ends of the rotating crosses in Fig. 12c are essentially the hinges for the rotating squares. This is what they called type of missing rib model as it is formed from a square grid with alternating vertical and horizontal ribs removed. Arising from this comparison, an analogy can be established on the auxetic mechanism of different auxetic models (Fig. 10).

Rotating square auxetic behavior [5]

Auxetic behavior rules of thumb [5]
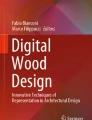
Using the rule of thumb to describe the direction of shapes rotation we will have a series of mechanisms. This is illustrated in Fig. 11 for the expansion and contraction of the perforated sheet, rotating square, anti-tetrachiral, missing rib, and re-entrant with models [5]. Tilted-swastika and the tetrachiral models rotate synchronously, i.e., every rotating unit rotates in the one direction during contraction and reverses during expansion. The code +−+− is introduced to refer to the alternating rotational directions. Opposed to this mechanism pattern is where all the units rotate in the same direction, and reverse only when the direction of applied load changes. Hence the code ++++ is proposed for all the chiral models, the missing rib (tilted swastika) model, the perforated sheets.
This analogy can go beyond more complex geometries like the interconnected star group and anti-chiral group. In these groups, the arrays of the geometries also play a role in their flexibility. This array takes place on the exact same crosses we extracted from the rotating squares. Here we tweak them to a more complex starlike shape [20]. For an instance, the square array of interconnected stars provides the context in which the vertices can act as hinges. This happens as an effect of the geometrical direction. If we position the vertices on the direction endpoints it will result in a concave octagon; on the other hand, positioning the center of the edges on the same endpoints for the anti-chiral group will result in a convex octagon in which the vertices again act as hinges, in a different mechanism, but all in auxetic behavior (Fig. 12).

Comparison of different patterns’ similar behavior [5]
The interconnected star groups were chosen for research on their behavior. The rules were defined in the Shape Machine to generate interconnected star shapes. Providing a generative tool for 2D geometries, we could manipulate the codes (shapes and rules) and get completely different and sometimes unexpected geometrical results. Each of which could potentially be an auxetic form which we need to evaluate their mechanisms (Fig. 13).

Interconnected star shape auxetic pattern
3 Conclusion

Shape Machine generation of the interconnected star
Knowing the different kinds of behavior that auxetic meta-materials demonstrate due to their designed feature, as designers and architects we want to take the most advantage of them for the purpose of more sustainable and adjustable environments. Auxetic materials can be applied and used for kinetic panels in different formats and textures. The focus of this paper was on finding the significance of their geometries in a comparative analysis to find out the grammars or rules to be used simply by applying them to the shapes without many mathematical algorithms to solve and generate them. Using Shape Machine for the first time to generate auxetic geometries, we found it a powerful generative tool for designers to be able to create auxetic patterns for their purposes by basic initial shapes and some rules of thumb to compare and analyze their behavior, as well as fast and simple transformations which generate numerous variations. The variety of transformations that Shape Machine provides including Isometry, Similarity, and Affinity provides us with a powerful tool to first detect the shapes and then transform them to the shapes that an auxetic geometry needs to perform. Having the history of each step of transformation also gives us more options both for generating new patterns and analyzing the patterns. These geometries ad their useful behaviors then can be used in multiple applications for a sustainable environment (Fig. 14).
References
Alderson, A., Alderson, K.L.: Auxetic materials. Proc. Inst. Mech. Eng. G J. Aerosp. Eng. 221(4), 565–575 (2007)
Wang. Z., Hu, H.: Auxetic materials and their potential applications in textiles. Textile Res. J. 84(15), 1600–11 (2014)
Economou, A., Hong, T.C., Ligler, H., Park, J.: Shape machine: a primer for visual computation, 65–92 (2021)
Critchley, R., Corni, I., Wharton, J.A., Walsh, F.C., Wood, R.J.K., Stokes, K.R.: A review of the manufacture, mechanical properties and potential applications of auxetic foams. Phys. Status Solidi B Basic Res. 250(10), 1963–1982 (2013)
Lim, T.C.: Analogies across auxetic models based on deformation mechanism, vol. 11, Physica Status Solidi—Rapid Research Letters. Wiley-VCH Verlag (2017)
Scarpa, F., Ciffo, L.G., Yates, J.R.: Dynamic properties of high structural integrity auxetic open cell foam. Smart Mater. Struct. 13(1), 49–56 (2004)
Konaković, M., Crane, K., Deng, B., Bouaziz, S., Piker, D., Pauly, M.: Beyond developable: computational design and fabrication with auxetic materials. ACM Trans. Graph. Association for Computing Machinery (2016)
Sanami, M., Ravirala, N., Alderson, K., Alderson, A.: Auxetic materials for sports applications. In: Procedia Engineering, pp. 453–458. Elsevier Ltd. (2014)
Vazquez, E., Duarte, J.P.: Bistable kinetic shades actuated with shape memory alloys: prototype development and daylight performance evaluation. Smart Mater. Struct. 31(3) (2022)
Fiorito, F., Sauchelli, M., Arroyo, D., Pesenti, M., Imperadori, M., Masera, G., et al.: Shape morphing solar shadings: a review, vol. 55, Renewable and Sustainable Energy Reviews, pp. 863–884. Elsevier Ltd. (2016)
Stiny, G.: Shapes of Imagination Calculating in Coleridge’s Magical Realm
Nasiri, S., Sarvdalir, A.R.: Geometrical origin of generative shape grammars for islamic architectonics Chapireh: the transforming element from cubic chambers to spheric Domes (2023)
Rafsanjani, A., Pasini, D.: Bistable auxetic mechanical metamaterials inspired by ancient geometric motifs. Extreme Mech. Lett. 1(9), 291–296 (2016)
Liu, L., Choi, G.P.T., Mahadevan, L.: Quasicrystal kirigami. 2021 April 27. http://arxiv.org/abs/2104.13399
Kurt Hong, T.C., Economou, A.: Design Computing and Cognition DCC’20. Springer (2021)
Hong, T.C.K., Economou, A.: What shape grammars do that CAD should: the 14 cases of shape embedding. In: Artificial Intelligence for Engineering Design, Analysis and Manufacturing: AIEDAM, 2022 Feb 2, 36
Afshar, A., Rezvanpour, H.: Computational study of non-porous auxetic plates with diamond shape inclusions. J. Compos. Sci. 6(7) (2022)
Grima-Cornish, J.N., Grima, J.N., Attard, D.: Mathematical modeling of auxetic systems: bridging the gap between analytical models and observation. Int. J. Mech. Mater. Eng. 16(1)
Yang, W., Li, Z.M., Shi, W., Xie, B.H., Yang, M.B.: Review on auxetic materials
Theocaris, P.S., Stavroulakis, G.E., Panagiotopoulos, P.D.: Negative Poisson’s ratios in composites with star-shaped inclusions: a numerical homogenization approach. Arch. Appl. Mech. 67(4), 274–286 (1997)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Open Access This chapter is licensed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license and indicate if changes were made.
The images or other third party material in this chapter are included in the chapter's Creative Commons license, unless indicated otherwise in a credit line to the material. If material is not included in the chapter's Creative Commons license and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder.
Copyright information
© 2024 The Author(s)
About this paper

Cite this paper
Nasiri, S. (2024). Auxetic Grammars: An Application of Shape Grammar Using Shape Machine to Generate Auxetic Metamaterial Geometries for Fabricating Sustainable Kinetic Panels. In: Yan, C., Chai, H., Sun, T., Yuan, P.F. (eds) Phygital Intelligence. CDRF 2023. Computational Design and Robotic Fabrication. Springer, Singapore. https://doi.org/10.1007/978-981-99-8405-3_10
Download citation
DOI: https://doi.org/10.1007/978-981-99-8405-3_10
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-99-8404-6
Online ISBN: 978-981-99-8405-3
eBook Packages: EngineeringEngineering (R0)