
Abstract
OTTO (Orthographic Trans-territorial Operator) is a sensory device that collects data on the urban environment through multi-spectral sensing to study urban energy flows. We hypothesize that urban nature and energy are a combination of biological and technological factors that interact in a symbiotic environmental cycle. By examining their relationships, we can gain insight into the impact of climate change. OTTO aims to create a high-res survey of the urban environment by using a new combination of multi-spectral bands. This research maps the relationship between urban form and energy exchange to gain a deeper understanding of urban microclimates through multiple types of energy data.
You have full access to this open access chapter, Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
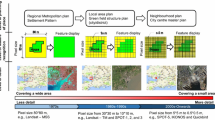
OTTO (Orthographic Trans-territorial Operator) is a device that helps to study and understand the urban environment by painting a landscape that not only records the visual but by capturing many other felt characteristics and unseen qualities in the immediate surroundings. It uses various sensors to survey, map, observe, and listen to the city and analyze the energy flows within. The goal is to understand how the living and non-living parts of the city interact and exchange energy and how the atmosphere affects these interactions. This research will contribute to a better understanding of how cities can adapt to the impacts of climate change. The device uses multiple spectrums of data to create a high-resolution map of the relationship between the city’s form and materials and its energy exchange, revealing details about the city’s diversity in microclimates (Fig. 1).

Diagram of applied methods
The main questions become how atmospheric effects influence the living and non-living participants of the urban realm and vice-versa. Can we provide some new information to find strategies for adapting to climate change?
The current paper presents the hardware and software setup of OTTO. It explains the strategies of correlating multiple sensor data (i.e., Temperature, humidity, solid particles in the air) with thermal imagery and LIDAR point cloud scans to understand the influences of urban morphology in this changing climate environment.
2 State of the Art
The current cloud-based multi-spectral data includes satellite imagery and geospatial information on a global scale. It detects long-term global phenomena but doesn’t address the immediate impact of climate change on urban energy flows. The challenge of getting high-res data is tackled with portable sensors. Several initiatives aim to gather urban data using extensive sensor networks (Diez Ladera and Posada 2013). These devices can acquire data such as air quality, luminosity, humidity, and temperature. Though the urban environment is a complex whole that is in continuous flux through the interaction of their living and non-living participants throughout different timelines of the day that can be manifested in multiple layers of energy flows.
Current research, such as in Shade Lab at ASU, focuses on thermal exposure by acquiring weather data related to human behavior by correlating climatic data and pedestrian behavior (Kulkarni et al. 2022). In the case of OTTO, the influence of changing environmental factors such as air quality, surface temperatures, luminosity, and many others are correlated with the urban changes observed in 3d imagery of LIDAR scans, 360° photography, and through the audio analysis of the microphone recordings and sonar sensing.
3 OTTO Hardware Development
3.1 Sensing Devices
The Core devices that regulated the organization of the design of OTTO through their technical and operating restrictions were:
-
Ouster OS-1 64 (bit) LiDAR Sensor [angular vertical scan of 45° divided by the horizon = 22.5° up and down, 360° horizontal scan]
-
Thermal Camera—FLIR C5—monodirectional 160 × 120 (19,200 pixels) true thermal imager, MSX® (Multi-Spectral Dynamic Imaging), 5-megapixel visual camera.
OTTO has been developed as a proof-of-concept prototype and includes budget-friendly sensors and microcontrollers based on the Arduino platform.
The Sensors applied at the final stage of the design of OTTO are as follows:
-
1x Arduino UNO and 1x Arduino MEGA with Custom Made Breadboard.
-
Grove Multichannel-Gas Sensor V2 [Carbon monoxide (CO), Nitrogen dioxide (NO2), Ethyl alcohol(C2H5CH), Volatile Organic Compounds (VOC)], Grove Gas Sensor MQ2 (gas leakage detector; LPG, propane, hydrogen), Grove Gas Sensor MQ-135 (Air quality; benzene, alcohol, smoke), 3x Adafruit TSL2591 High Dynamic Range Digital Light Sensor [188 uLux sensitivity, up to 88,000 lx input measurements, infrared-light], FLIR C5 (incl. Wi-Fi), Grove Oxygen [02] Sensor (MIX8410), Sparkfun Weathershield (temperature, humidity, air pressure, wind, and precipitation), Comimark UVM-30A UV Ultraviolet Ray Detection Sensor Module, Adafruit PMSA003I Air quality Breakout (PM1.0, PM2.5 and PM10.0 concentration in both standard & environmental units). Powered with 2x 12V 8AH Battery.
The Arduino-based development of the project put many limits to the core dataset gathered through these sensory devices. For the purpose of refining the results, many different sensors have been tested. Integrating multiple hardware devices in the R&D process poses a significant challenge, as each device has unique physical specifications and coding requirements. Ensuring a stable data flow requires a meticulous approach to combining these elements in a way that accommodates the varying needs of each device. This can present a significant barrier to the success of R&D processes, as even minor inaccuracies in the integration of hardware devices can result in data disruption or loss.
To mitigate this challenge, it is crucial to thoroughly research and understand the requirements of each individual hardware device before attempting to integrate them. This includes examining the physical specifications, such as size, power requirements, connectivity options, and coding requirements, including any necessary software, and programming languages. By carefully considering these factors and conducting thorough testing throughout the integration process, it is possible to establish a stable data stream that accurately reflects the results of the R&D process.
Some sensors would give us only qualitative results combined with those that give us quantitative results. The assembly of gas sensors is representative of this case. Even though Digital light Sensors give us a range of lux sensing, they have to be individually set up for the different pre-set scenarios of direct daylight, ambient light, nighttime, and interior scanning.
3.2 OTTO Design (Prototype)
The following were the guidelines for designing the hardware skeleton and structure:
-
Rain protection for the sensors without affecting the measuring result.
-
Transportable as a cabin baggage, weight and size.
-
Flexibility in the system to be adjusted to different scanning scenarios.
-
Easy customization for continuous improvements.
-
Cable management has to be flexible and robust.
-
Adjustable to different heights to deal with different urban scenarios.
-
Quick deployment for starting and ending the scanning process under harsh environmental weather conditions.
-
Stable and robust frame for The LiDAR point cloud scanning.
To meet the stated objectives, 3D printing with filament extrusion was determined to be the most efficient materialization, development, and production method. Various filaments, including PETG, PLA, and ABS, were evaluated and tested based on deformation, material stability, and porosity under heat and rain exposure. This evaluation process considered various printing scenarios and configurations, leading to the selection of an extruder utilizing PETG filaments. This method was deemed the most suitable due to its balance of budget-friendliness, speed, precision, and accessibility in different cities worldwide for replacement purposes (Fig. 2).

Hardware iterations of OTTO. The first iteration where the modular body of the device was developed, contained the LIDAR sensor and environmental sensors. (Left) In the second iteration The modular body was extended to include the extended version of environmental sensors and thermal camera. The final iteration included rain protection and 3D camera (right)
The geometry of OTTO is based on a truncated octahedron segmented into its individual joints. The system is regulated by a single regular joint knot, which allows for technical extension in all directions and connection through screw nuts on the central axis. Originally it was tested to route the wiring through the axis of the knots themselves, but relatively soon had to balance the relationship of the size of the knots with the number of wires we are able to route through them. The more flexible and efficient way for prototyping turned out to be external routing. It kept OTTO’s knots and general size relatively small, making dismantling for packaging easy. All Arduino Sensors and the Thermal Camera (on the central axis to the Lidar) have been organized around the same principle. Weatherproof closures were achieved by the careful routing of the wires and coverage of the electric contacts. The sensors themselves have individual custom caps to achieve rainwater drainage. The volume inside the truncated octahedron gave us space to position the Arduino microcontrollers as a central “heart” of OTTO which kept wiring at the minimum. Any other organization of the core OTTO microcontrollers incl. The Weathersfield outside the center increased wiring and put the “heart” into a vulnerable position while moving OTTO through the city. The Ouster LiDAR sensor was positioned on top of all other sensors to avoid obstacles during measurement.
4 OTTO Software Development
4.1 Serial Monitoring and Computer Communication Interface
OTTO acquires data using three communication protocols that save the streams in three file types. Two Arduino boards with environmental sensors send the data via USB to a computer using a listener interface. The data is collected by an Arduino Mega and sent as a.csv file. A node-red-based protocol is used to process the data in the.csv file and write each spectral dimension as a column into an SQL database. Each acquisition is tagged with the acquisition location as longitude latitude, and acquisition time to enable the filtering of the data in the SQL database (Fig. 3).

Visualization of the LIDAR point cloud and the overlay of nighttime temperatures
The communication protocol of the Lidar system was evaluated through two distinct methods. The LIDAR device comes with its own recording and visualization platform, which provides real-time access to the Lidar point cloud and calibration information of the sensor, including the IMU sensor. The platform timestamps each frame and stores a series of frames over a specified duration in a native format called “pcap”. However, long-term recordings in this format can consume large amounts of data stored. Alternatively, a Python code based on the Ouster SDK was developed to directly access the LIDAR scanner via localhost. This approach enables the saving of necessary information, such as the XYZ coordinates of each point in the point cloud, in a.csv file, which can then be imported into any visualization interface for observation, visualization, and analysis.
The existing Ouster Studio Interface is a powerful visualization system. The recorded point cloud is easily executable to.csv. An additional interface provided by Open3d enables the users to visualize the point cloud in a custom web interface. The Open3d python package also comes with a machine learning interface that enables users to apply 3d object recognition tasks on the point cloud (Argueta 2022).
The thermal images were essential to visually compare the places of data acquisition from an IR spectral band. These were used to compare the urban heat properties of different locations within the same city. In this case, the thermal image is an important indicator of the impacts of the materiality on the overall heat behavior of distinct places.
The thermal image acquisition is conducted via an internal code from the computer, pinging the camera to save an image frame each second. The reason for longer acquisition periods is to detect the changes in surface temperatures throughout the time, record impacts of moving objects such as cars or humans, and map their influence on the further recorded data layers.
4.2 Data Post-processing and Analysis
4.2.1 Post-processing Sensor Data
The sensor data is analyzed by applying three different kinds of correlation approaches. The first approach correlates data dimensions in one location to understand the underlying relationship between the acquired environmental values. For such correlation, sensitivity analysis using regression was applied to analyze the sensitivity of each multispectral dimension to the other ones. In this analysis, the sensitivity of the gas values was calculated in regard to the changes in weather conditions such as temperature, humidity, wind speed, and direction.
The secondary correlation was conducted between different places to localize the environmental tendencies within the urban conglomerate.
The final comparison was the changes in the environmental conditions of the same area within the different time gaps of the day to understand the transmission of energy throughout the day and night.
4.2.2 Post-processing Thermal Images
Usually, a thermal camera acquires a data type called radiometric JPEG. This format inherits for each pixel 4 dimensions of information. Additional to R, G, and B dimensions, it also has an additional dimension for temperature. When directly acquired with the camera, one can access these channels through the FLIR’s own software. However, when pinged via a laptop connection, FLIRs own system blocks the host from directly accessing the infrared sensor. To map the thermal information easily in post-processing all the images were acquired in grayscale with a preset upper and lower threshold for visualized temperatures. This way we can map the grayscale back to a numeric domain.
5 Results
5.1 Phoenix Case Study
Phoenix is one of the hottest cities on earth. With an arid climate in the desert, the city is facing big challenges driven by heat. The extreme heat rising to 48 °C (Hondula 2020) during hot summer months does make outdoor urban life challenging. Within the greater urban area of Phoenix temperature differences of up to 12 °C (Hondula 2020) can be observed between different urban areas. This difference is not dependent on the building density, as a large part of the city is populated by single-family houses but rather on the materiality of built surfaces and the distribution of greenery and vegetation.

Daytime (left) and nighttime (right) UHI maps and markings of the survey locations and their properties in regard to heat, vegetation and water surfaces
Selection of the survey areas was conducted by mapping these extreme zones within various satellite data sets provided by Google Earth Engine using QGIS. And by collaborating with local researchers to understand the demographics and existing strategies for mitigation of urban heat island effects (Fig. 4).
Eight areas for the survey were selected, each displaying different environmental and demographic properties. In the following sections, a summary of the results from this survey will be demonstrated.

Comparison of VOC levels (left) in the hot zone of Glendale Phoenix with the implementation of the Cool Pavement project (represented in red), and a cooler area of Arrowhead Park Lake (represented in blue) with a large water body. Comparison of temperature difference in the same areas (right). These two diagrams illustrate how the use of cool pavement could potentially decrease environmental temperatures. However, it's important to note that through the radiation process, gases such as VOC are released into the atmosphere, which can have a negative impact on air quality
5.2 Comparison of Extremes within the City of Phoenix
The survey areas were divided into two groups of hot and cool zones. The comparisons were conducted by juxtaposing the exact dimensions of data in different zones. One important observation was that the hotter residential areas also lacked the greenery and shadow areas created by the vegetation. The socio-economic differences between the residential areas can be quickly observed in the vegetation distribution. The lack of green areas and shadow is resulting in the surface overheating of the surfaces and increasing the overall temperature of the area. The City of Phoenix undertakes actions to mitigate the heat and nighttime temperatures through thermal radiation. One of these actions is painting the asphalt white to decrease the heat gain and avoid nighttime heat radiation. One of the test areas was also selected as a survey location compared to the cooler zones’ areas. In this comparison, an important observation was that the outdoor temperatures were lower compared to the cooler zones. However, when comparing the air quality, a large difference was observed in the amount of VOC (Volatile Organic Compounds). Which was dramatically higher in the hot zone with the painted pavement.Footnote 1 Based on these observations, it is assumed that the pavement’s paint can release organic chemicals when exposed to heat. Even though it is decreasing the environmental temperature, it is also increasing the air pollution in the area. However, a larger data set of observations over a longer period in different seasons must be acquired and analyzed to make a precise conclusion (Fig. 5).
5.3 Results of Sensitivity Analysis
Through sensitivity analysis, the correlation between different data dimensions within a survey area were examined. In Phoenix, we observed a strong co-dependency between air quality and temperature, as well as between air quality and time of day. In hot areas with increasing temperatures, the release of volatile organic compounds (VOCs) also increased. Although some plants can release VOCs with increasing temperatures, a dense plant distribution in the hot areas of the survey was not observed. Therefore, we assume that the surface or coating materials could be related to the increasing release of VOCs.
Interestingly, a similar correlation was also observed in cooler zones with dense greenery. However, the direct correlation between temperature and VOC was not evident in cooler areas with less dense greenery. The complexity of the relationships between data dimensions makes it challenging to draw clear conclusions. Nevertheless, our research aims to explore further the correlations between VOC and temperature to gain a better understanding of this complex relationship (Fig. 6).

This diagram shows the correlation of all the sensor dimensions, where red represents the highest measurements and white represents the lowest. It illustrates the correlation between different sensor measurements during a one-hour sensing event, providing a timeline of the data collected
5.4 Comparison of Day-Time Night-Time Surveys
The survey locations were examined during both daytime and nighttime. These locations were surveyed and recorded during the early morning hours, before sunrise until half an hour after sunrise, at noon, and after sunset. In Phoenix, public spaces are typically used before the high temperatures hit the city, which means before 8 AM in the morning and after 7 PM in the evening. During the time in between, public spaces are rarely used. The data analysis showed that heat radiation at night is very high in residential areas due to the wide asphalt streets. After sunset, the surface temperature of asphalt remains at 40 °C (Fig. 7).

Temperature landscape of the same survey zone in night time (left) after sunrise (middle) before sunrise (right)
During the nighttime recordings, a constant air temperature of 37–40 °C was observed over an hour of the recording period. In the morning hours before sunrise, temperatures started at 28 °C and rose to 37 °C after sunrise.
The high temperatures also had an impact on wind speed, as gusts were observed to increase with rising temperatures. This may occur due to the movement of hot air that has been heated through radiation.
6 Conclusions and Future Work
But while the climate crisis was engineered in the past, it was mostly in the recent past; and the degree to which it transforms the world of our grandchildren is being decided not in nineteenth-century Manchester but today and in the decades ahead (Wallace-Wells 2019).
Climate change is a persistent issue that requires a comprehensive understanding to make informed conclusions. It is important to comprehend the relationship between the built environment, materiality, and human influence using architectural tools to adapt to its impacts.
One of the limitations of this research is the survey and observation time. The survey of Phoenix (as well as other survey zones which are not described in this paper) were conducted in the yearly extreme seasons. Though the seasonal extremes can also have their meteorological diversities. That means the hot season does not include only hot days and there can be meteorologic deviations. Therefore, surveying a large urban area within a short period of time does not provide a complete overview of the energetic events of the urban zones. Also, comparisons between locations within the same urban areas must always be conducted under similar meteorological circumstances. With the limited survey time finding a similar meteorological circumstance can be challenging. To overcome these issues, we suggest combining the acquired data with online available satellite and environmental information in the next steps.
Still, data post-processing steps are missing that will correlate the urban LIDAR data with the sensor recordings. One step in development is the analysis of the 3d point cloud to detect the changes within the survey area with the help of machine learning. This will help the team to detect the interchanges introduced through moving urban participants.
Another focus will be surveying other cities in extreme climate zones to learn about their challenges and mitigation strategies. The next survey will be conducted in Jakarta Indonesia.
Notes
- 1.
VOC is compounds that are human-made chemicals that are integrated into paints, pharmaceuticals, or refrigerants (EPA 2022).
References
Argueta, C.: 3D Object Detection with Open3D-ML and PyTorch Backend (2022). https://medium.com/@kidargueta/3d-object-detection-with-open3d-ml-and-pytorch-backend-b0870c6f8a85. Accessed 25 Nov 2022
Diez Ladera, T., Posada, A.: The fab and the smart city: the use of machines and technology for the city production by its citizens. s.l.:s.n (2013)
EPA.: United States Environmnetal Protection Agency (2022). https://www.epa.gov/indoor-air-quality-iaq/what-are-volatile-organic-compounds-vocs. Accessed 05 Feb. 2023
Hondula, D.: Urban Heat in Phoenix: Patterns, Causes, Impacts ASU Urban Climate Research Center, Phoenix (2020)
Kulkarni, K.K., et al.: MaRTiny—A low-cost biometeorological sensing device with embedded computer vision for urban climate research. Front. Environ. Sci. 10
Wallace-Wells, D.: The Uninhabitable EartLife afterter Warming. 1st, edn Pinguin Publishing, New York City (2019)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Open Access This chapter is licensed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license and indicate if changes were made.
The images or other third party material in this chapter are included in the chapter's Creative Commons license, unless indicated otherwise in a credit line to the material. If material is not included in the chapter's Creative Commons license and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder.
Copyright information
© 2024 The Author(s)
About this paper

Cite this paper
Balzar, M., Balzar, Z.A., Asan, G.M. (2024). OTTO: A Portable Urban Sensing Station to Survey the Energetic Footprint of Urban Microclimates. In: Yan, C., Chai, H., Sun, T., Yuan, P.F. (eds) Phygital Intelligence. CDRF 2023. Computational Design and Robotic Fabrication. Springer, Singapore. https://doi.org/10.1007/978-981-99-8405-3_25
Download citation
DOI: https://doi.org/10.1007/978-981-99-8405-3_25
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-99-8404-6
Online ISBN: 978-981-99-8405-3
eBook Packages: EngineeringEngineering (R0)